- gf24240 的博客
《梦溪笔谈·笔记》2025/6/26:线性动态规划
-
 gf24240
LV 10
@
2025-6-26 17:46:47
gf24240
LV 10
@
2025-6-26 17:46:47
背景
D老师要变法了,竟然让我们做笔记!!!不过我做了……
动态规划是……额(别管,反正我有重要的东西)。
动态规划有三点特征:
- 无后效性
- 最优子结构
- 重叠子问题
特征
1. 无后效性
用求斐波那契数列来举例。
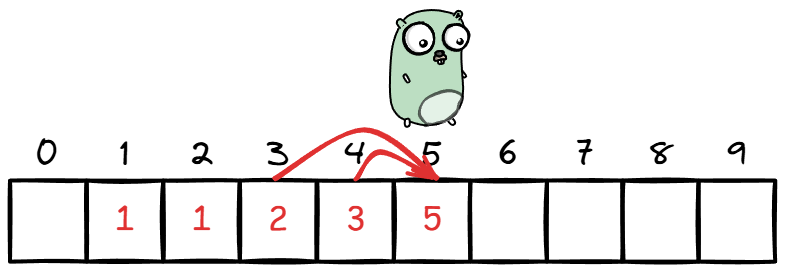
在求 fib 时小拨鼠一直往前走,且每一项只与前两项关联,不会——用 D 老师的话来说——算着算着突然到前面把一个数字的答案改了。
其实下面这个特征没听懂,只好从字面理解一下。
2. 最优子结构
可能类似贪心,每次解决子问题时都选取最优的答案,从而保证整个结果的答案最优。
3. 重叠子问题
这个比较好理解。和分治有点像,动态规划也是把一个问题转化成几个重叠的子问题,逐一求解,再把子问题的解拼接起来。得到整个问题的最优解。图示:
怎么感觉怪怪的?

解题思路
其实动态规划和递推很类似。翻了一下前面递推的解题思路,竟然和动态规划一模一样!
下面是步骤(都是动宾短语耶):
- 分析问题
- 定义状态变量
- 设计状态转移方程
- 设置初始状态和边界
- 确定答案
1. 分析问题
分析问题,就是分析这道题能不能用动态规划来做。
但是这里要说的是动态规划的解决方法。既然解题步骤都和递推一样,那么解题方法肯定是可以用递推来做的。还是用求斐波那契数列来举例。这个都会吧?下面是核心代码:
f[] = {0};
f[1] = f[2] = 1;
for (int i = 3; i <= n; i++)
{
f[i] = f[i - 1] + f[i - 2];
}
cout << f[n];
时间复杂度: 。
很容易联想到这个也能用递归来解。其实也说明了动态规划是可以用递归来解的,因为它和分治类似,都是分解子问题。下面是递归的核心代码:
int fib(int x)
{
if (x == 1 || x == 2)return 1;
return fib(x - 1) + fib(x - 2);
}
但是由于子问题是重叠的,而且(如图)求第 6 项的时候已经求过第 4 项了,在求第 6 项的第二个分支(即第 5 项)的时候不需要再求一遍了。
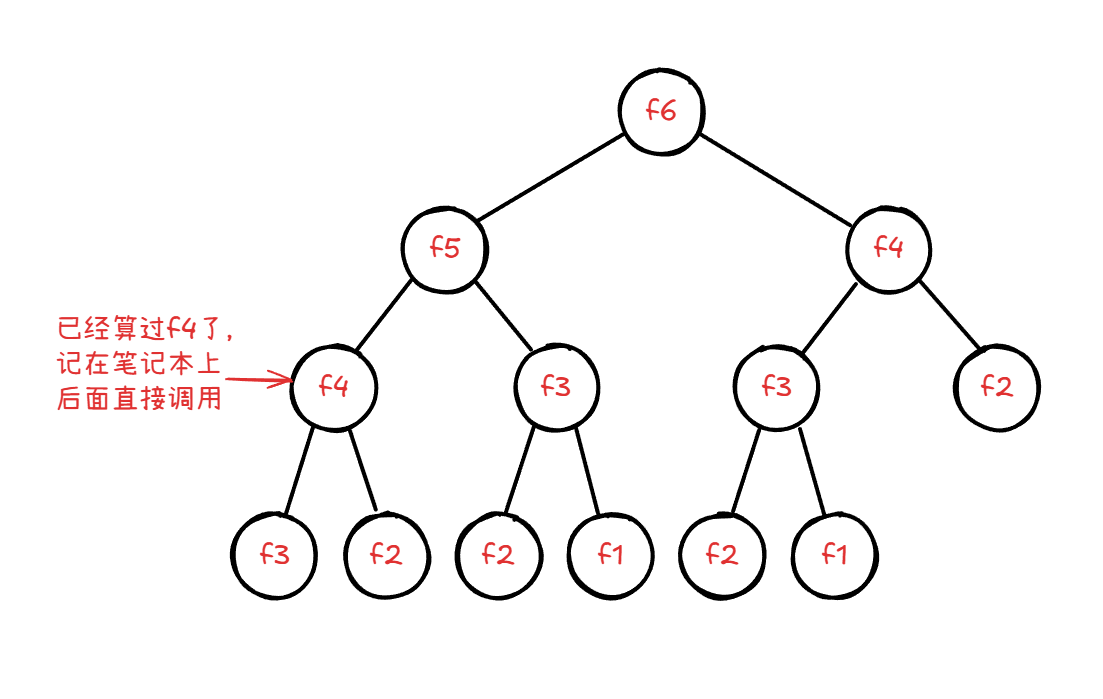
这就要考虑记忆化剪枝。以下是记忆化剪枝的核心代码:
int f[N];
int fib(int x)
{
if (x == 1 || x == 2)return 1;
if (f[x])return f[x];
return f[x] = fib(x - 1) + fib(x - 2);
}
经过优化后,递归写法也可以优化到将近 的时间复杂度。
2. 定义状态变量
状态,就是小拨鼠在计算这一项的状态。而变量,就是和这一状态相关的变量。既然使用递推(即填表法)的方法求动态规划,那就需要一张表。怎么得到这张表呢?就需要关系到状态变量了。最简单的方法就是多少变量就定多少维。 但这太浪费了,我还有一个序号 呢。 这一步就是设计表格(表的每一格表示的意思)。用求 fib 举例。很明显,可以发现与当前状态相关的变量只有两个:序号 和当前值 。因此,关于求 fib 的表只需要 1 维就够了。其实判断要怎么设计表格也有技巧(用求 fib 举例):
- 从问题出发。问题是:求斐波那契数列的第 项? ;
- 把问题转化为数学公式: ;
- 答案就是 ;
- 转化成通式: 。
由此就能得到设计的表格。
3. 设计状态转移方程
可以把它想象成(其实就是)填表的方法。这样想就会容易得多:我从哪里来?我要到哪里去?
用求 fib 为例:求 fib 的状态转移方程就是:
4. 设置初始状态和边界
这无非就是几种可能:
- 全部都为最小值或最大值;
- 全部都与输入相同;
- 第一项与输入相同;
- 前几项为已知值。
用求 fib 举例,初始状态就是 f[N] = {0},边界就是 f[1] = f[2] = 1 。
5. 确定答案
这也只有几种情况:
- 数组的第 项;
- 数组的最大或最小值;
- 数组所有数的和。
用求 fib 举例,答案就是 f[n]。
D 老师给我们上传文件图片的权限吧,每次都要截图、保存、上传到 luogu 太麻烦了。再说, luogu 也是要空间的。